
I am currently a Master’s student in Control Science and Engineering at Zhejiang University, advised by Prof. Qinyuan Ren. I am passionate about robotics, with a focus on making robots robust in dynamic, unstructured environments. My research combines control, planning, and reinforcement learning to enable autonomous systems that work reliably in the real world.
My work emphasizes cross-disciplinary collaboration, as seen in my internship at ETH Zurich’s Computational Robotics Lab(CRL) with Dr. Yijiang Huang. I thrive in environments that mix mechanical design, control, and AI, and I’m passionate about mentoring juniors and fostering inclusive academic spaces. I’m applying to PhD programs to advance reliable robotic systems for dynamic, unstructured environments.
Feel free to contact me!
📚 Research Interests
My current research focuses on developing reliable robotic systems capable of operating in cluttered environments and adapting to changes in real-time. Specifically, I am interested in the intersection of:
- 🤖 Robotics: Autonomous manipulation, task-and-motion planning, mobile robots, legged robots
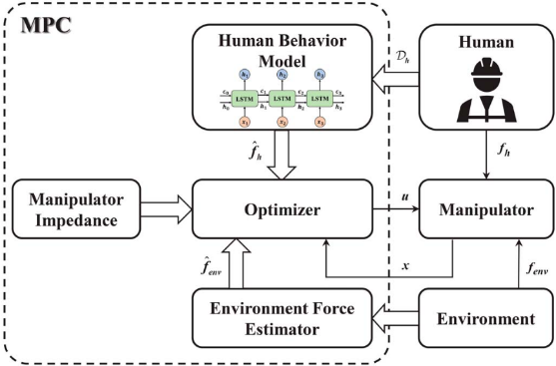
- 🏗️ Control Systems: Hybrid force-position control, human-robot interaction
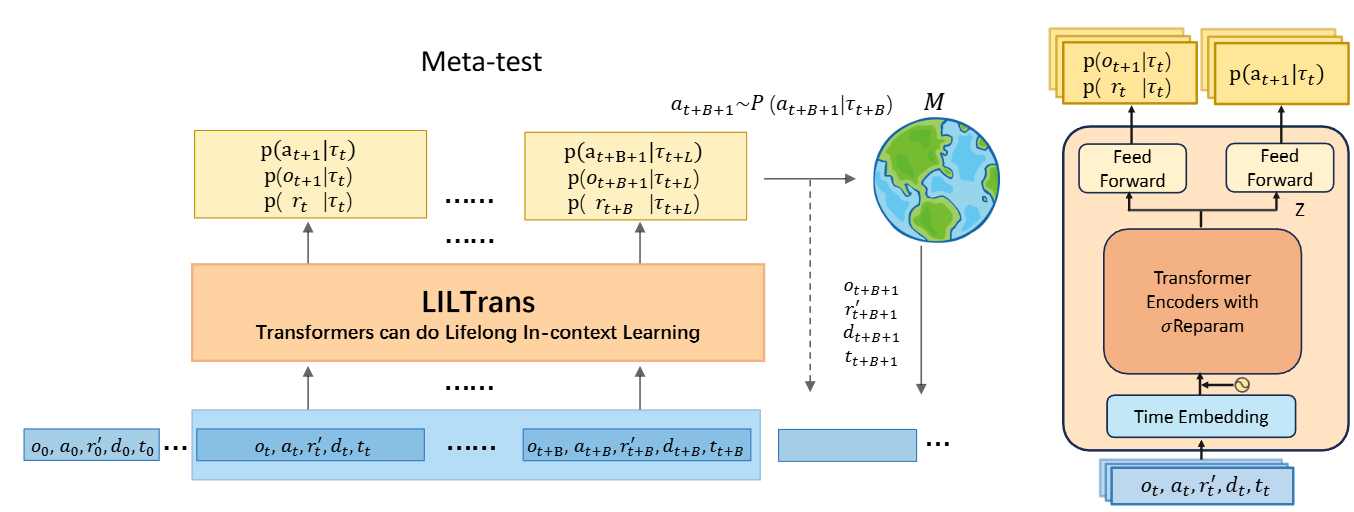
- 🧠 Machine Learning: Reinforcement learning, imitation learning, data-driven control
I aim to advance the field by developing robots that can understand and adapt to dynamic environments, including human-robot interaction in assistive living, sports, and construction applications.
🎓 Education
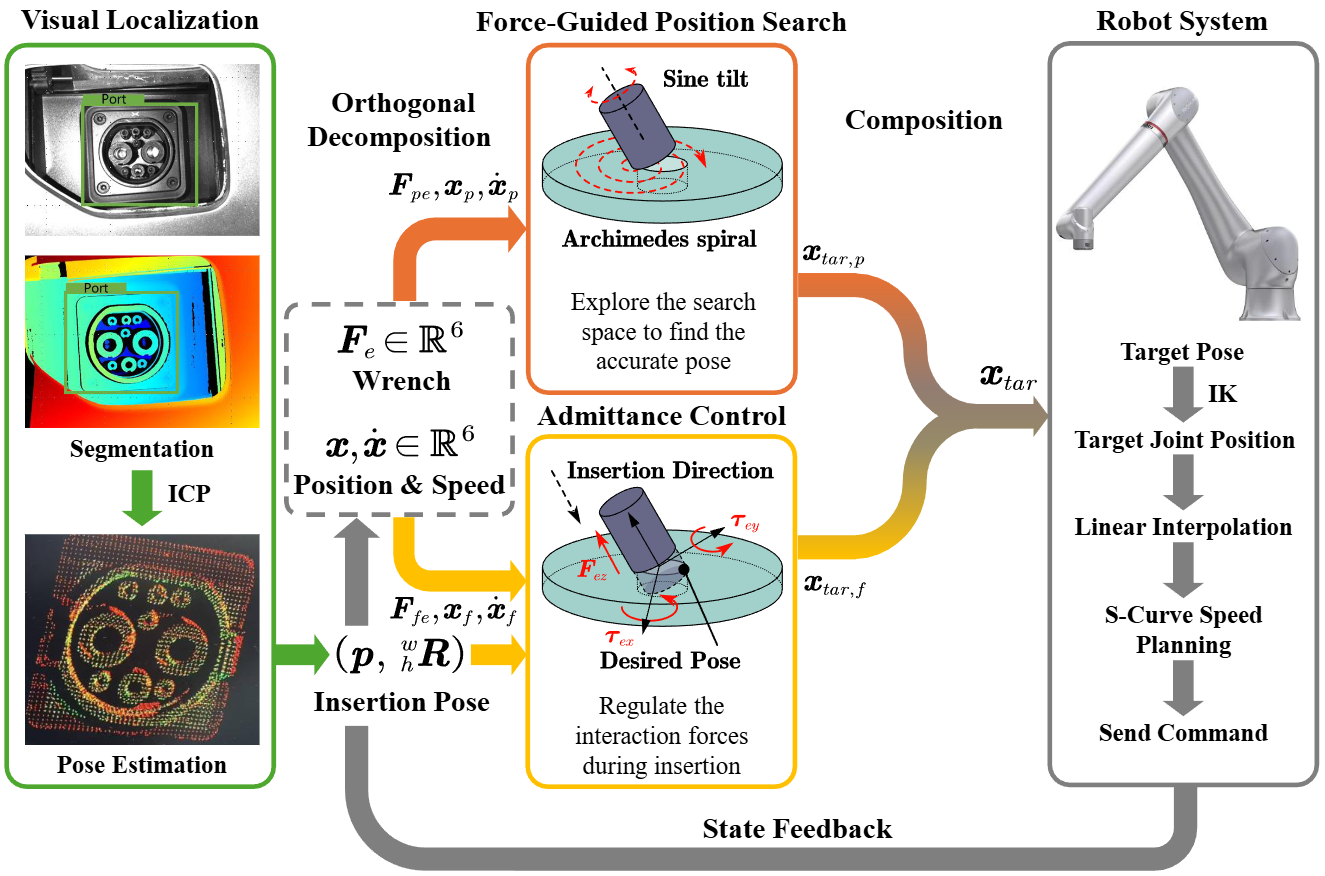
- Master’s Degree in Control Science and Engineering, College of Control Science and Engineering, Zhejiang University, Hangzhou, China, Advisor: Prof. Qinyuan Ren. (Ongoing; Thesis: Multi-modal Perception and Control Strategy for Unlocking Tasks Utilizing Manipulators)
- Bachelor’s Degree in Mechatronics Engineering (Chu Kochen Honors Program) and Bachelor’s Degree in Automation(Control), School of Mechanical Engineering, Zhejiang University, Hangzhou, China.
🔎 Research Experience
Zeno AI
Embodied AI Researcher, Nov. 2025 - Present
Research Focus: Whole-body teleoperation and embodied AI
Advisor: Prof. William Zhi
CRL Lab, ETH Zurich
Research Intern, Jun. 2024 - Present
Research Focus: task and motion planning (TAMP) strategies for autonomous scaffolding assembly utilizing mobile manipulators
Mentor: Dr. Yijiang Huang
ZJU-Biorobotics, Zhejiang University
Undergraduate Research Intern, Mar. 2021 - May. 2022
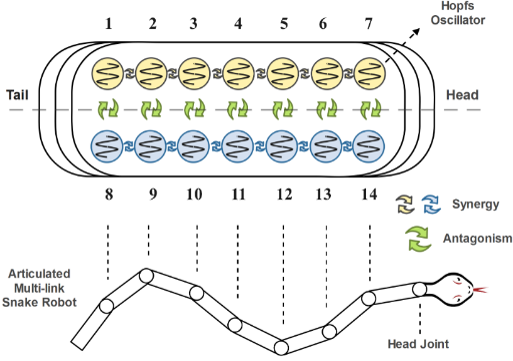
Research Focus: Mechanical design and locomotion control of bio-inspired snake-like robots
Advisor: Prof. Qinyuan Ren
ROBOMASTER, Shenzhen Dajiang Innovation Technology Co., Ltd
Developer, Sep. 2020 - Aug. 2021
Focus: Electrical design and embedded algorithm development of engineering robots
Mentor: Dr. Pujing Lin
Robotics & Machine Intelligence Lab, Zhejiang University
Undergraduate Research Intern, Jul. 2020 - Aug. 2020
Research Focus: Locomotion of legged robots
Advisor: Prof. Qiuguo Zhu
Mentor: Dr. Zhicheng Wang
🛠️ Professional Experience
Below is an overview of the R&D work on industry-grade robotic products that I have led or participated in.
Position: Electrical Engineer
Main work: Designing circuit boards, developing embedded programs, and building Python backends

TT15

APe15
Autonomous navigation and flexible operation; equipped with SLAM laser technology for intelligent path planning; efficient operation in warehouses and other complex industrial environments; optimizes production efficiency and reduces labor costs.

Position: Intern
Main work: Developing control algorthms

Cleaning of glass curtain walls and photovoltaic surfaces; autonomous perception with intelligent path planning and automatic obstacle avoidance.
Position: Project leader
Main work: Leading the development and designing control algorithms
FORCE-02
Fully automated charging process; unmanned, high-efficiency scheduling system; autonomously adapts to complex charging environments to maximize charging efficiency and resource utilization.
📝 Selected Publications
Zihao Li, Siqi Wang, Xiaocong Li, Yiming Zhu, Zhe Zhong, Yilin Lang, Qinyuan Ren
IEEE 19th International Conference on Control & Automation (ICCA), 2025
Yilin Lang, Zihao Li, Zhaoyang Li, Yanan Li, Qinyuan Ren
IEEE Transactions on Industrial Electronics, 2024
Tengye Xu, Zihao Li, Zihao Li, Qinyuan Ren
Forty-first International Conference on Machine Learning, 2024
Zihao Li, Jiangpeng Hu, Qinyuan Ren
IEEE 17th Conference on Industrial Electronics and Applications (ICIEA), 2022
For more details, please visit: Zihao Li
🏆 Honors and Awards
- The 2nd winner of the International Design Contest (IDC RoboCon), Aug. 2022
- Arawana’s Scholarship of Yihai Kerry Arawana Holdings Co., Ltd, 2022
- Frist prize of China Univeristy Robot Competition (ROBOMASTER), Aug. 2021
- Hong Huang and Xiaobei Wu’s Scholarship, 2021
- Frist prize of Chinese Mathematics Competition (CMC) in Zhejiang Province, Dec. 2020
- Frist prize of Zhejiang Physics Innovation Competition, Dec. 2020
- Zhejiang Provincial Government Scholarship, 2020
- Zhejiang University Scholarship - Second Prize, 2020
- Zhejiang University Academic Excellence Award, 2019 - 2020
- Zhejiang University Artistic and Athletic Achievement Award, 2019 - 2020
🎽 Specialties and Hobbies
- I love basketball🏀, badminton🏸, swimming🏊 and so much more.
- I enjoy video games like Hollow Knight and God of War.